Showcase of NISAR’s projects in process automation & engineering tools
Here, we would like to take the opportunity to showcase some of our reference projects:
Task Force Automation in Factory
A sudden yield drop in the factory is very expensive – one does not simply lose maybe 10% of the parts, but these 10% consume the 10% margin we have!
Thus, a task force of experts is called to identify the root cause. This is a strongly manual process, where the experts follow the guidelines of a QA/QS process and sift through the data.
In our POC we automatized this process with PAMAS:
– Moderator agent to coordinate the team and implement the QA/QS strategy
– Data Engineer and Process Engineer agents
– Interactive process with review after each step


ESG Training & Podcast Generation
Creating learning materials from documented knowledge is still a highly manual task. In these two POC we demonstrated the creation of learning materials from documents. This includes ingesting the materials and generating a Knowledge Tree model. Then a concept for the podcast or Trainings plan is generated and the sections are filled with knowledge from the model. In case of the training with questions to verify and document the success of the training.
Using the Design Studio the users can configure the creation of the podcast themselves.
– Parsing of documentation
– Creation of Knowledge Tree model
– Breakdown into learning sections
– Generation of Audio output


Nawa Bot – Project and Jira Assistant
Ticket management in Jira consumes a lot of time for the product owners and project managers. In this POC we demonstrated automating the ticket management: understanding the scope of a new sub-project by a interactive dialogue system and creation of user stories and subsequently tasks with Gen AI. These are finally fed back to Jira.
– Interactive dialogue system
– Ticket creation and breakdown
– Utilizing Jira API

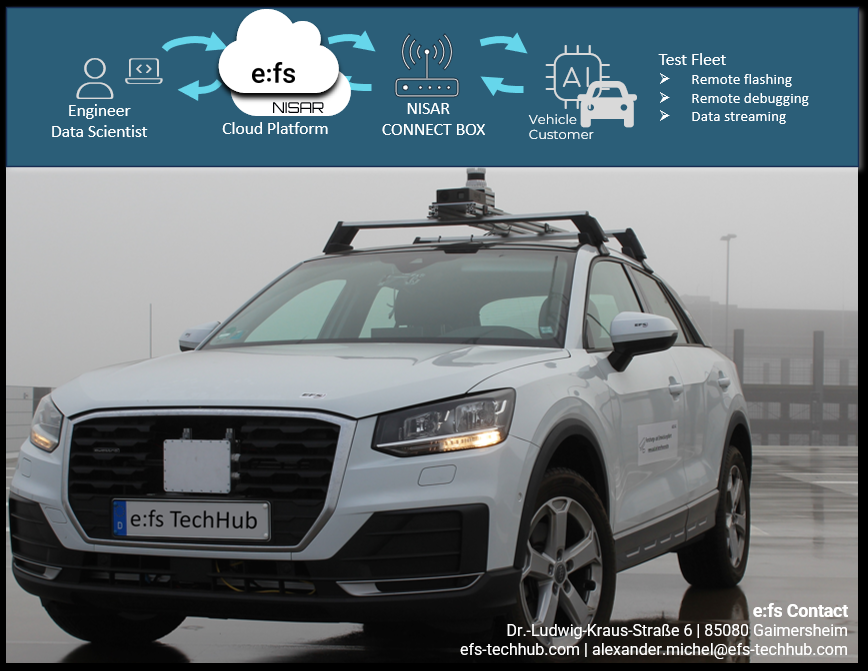
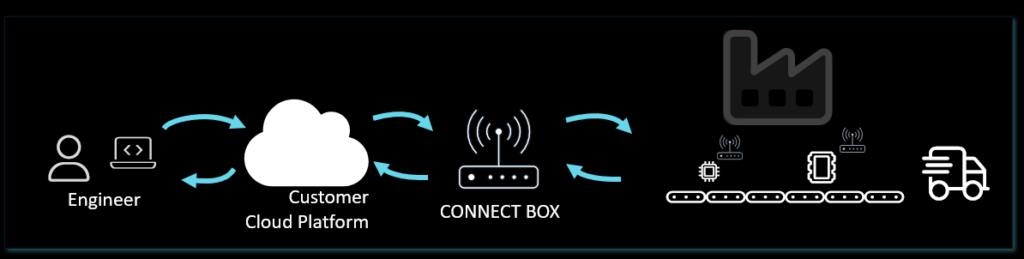
IoT connectivity, Cloud Platform, Function Development
NISAR and e:fs join forces:
Combining new ideas from the startup ecosystem with extensive experience in series development and validation we strive to change the way how automotive software is developed today.
– Test car for data recording, remote connectivity
– Cloud platform
– IoT connectivity for car-pc to cloud platform
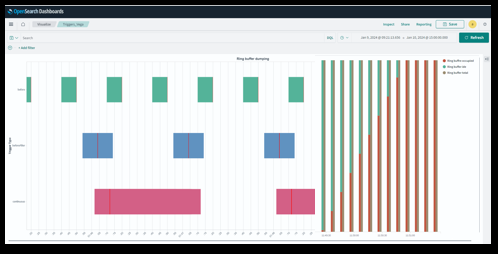
Traffic Scenario Recorder based on Ring-Buffer
NISAR and e:fs join forces:
Combining new ideas from the startup ecosystem with extensive experience in series development and validation we strive to change the way how automotive software is developed today.
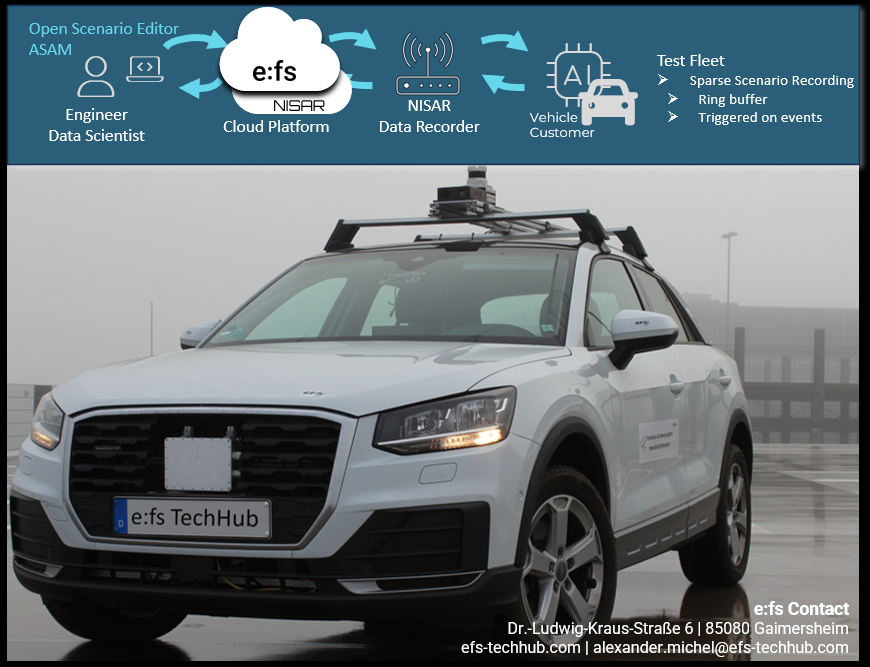
-Sparse Scenario Recording
-Do not record hundreds of hours and km, just record what is relevant
-Store vehicle sensor and bus data in ring buffer
-Store ring buffer content based on triggers, i.e. sharp braking
ECU remote monitoring & flashing on production line
Monitoring & flashing ECU already on the production line
Software for ECUs is increasing rapidly in size. And so is the flashing time needed at End-of-line flashing stations.
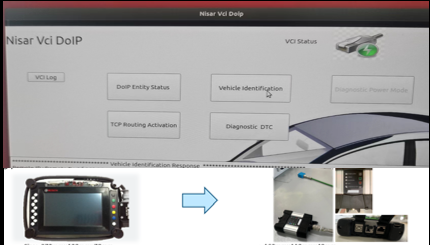
With our IoT connector the ECU is already flashed while on the line, saving time at EOL.
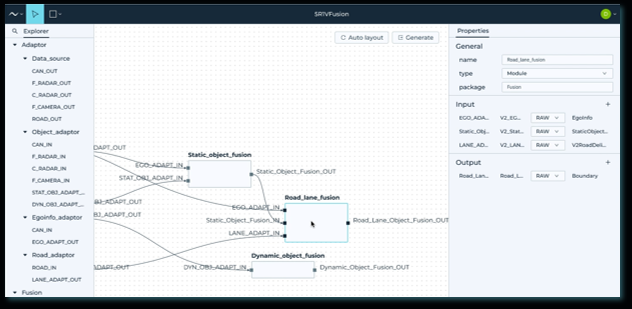
XDP Showcase with TogetherOS
Member of the Horizon Ecosystem
Code Generation for Horizon TogetherOS from Software Architecture i.e. for a camera fusion system.
Built into NISAR Architect Design Studio
XDP Showcase with AUTOSAR
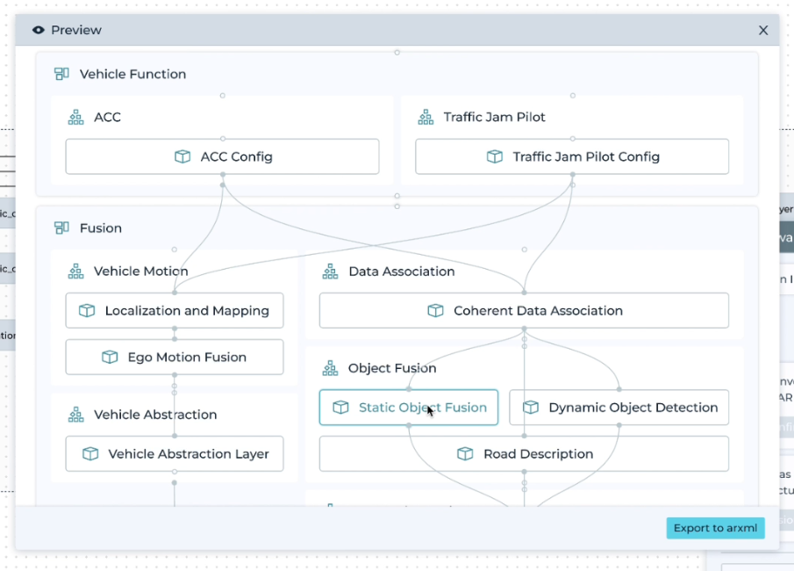
Phase 1:
Integrating Nisar ADS with ETAS AUTOSAR Toolchain, enabling the generation of AUTOSAR code from abstract architectures
Phase 2:
Enabling the bridge from pre-development in ROS to AUTOSAR via the abstract architecture
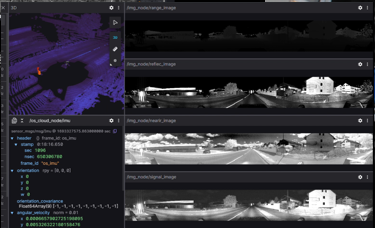
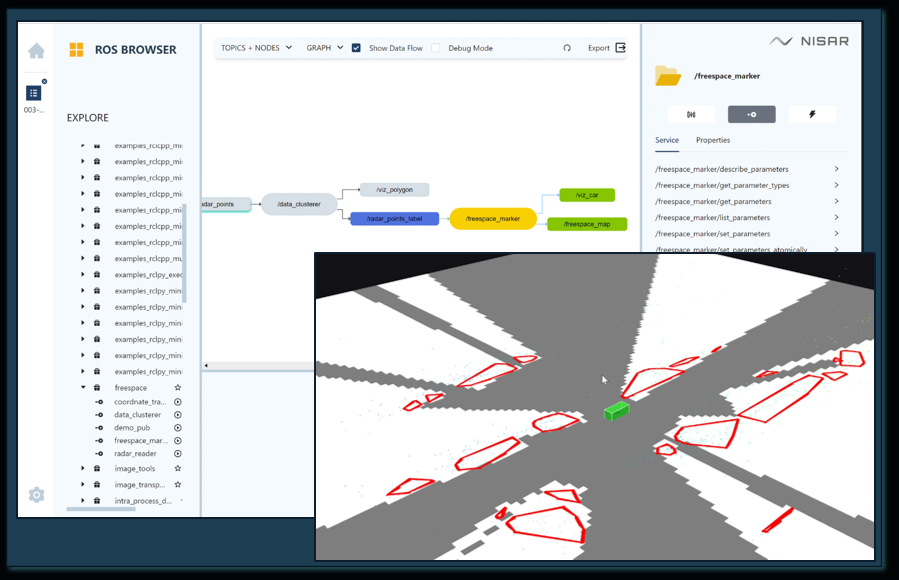
Multi Radar Sensor Fusion
Creation of a central 360° environmental model from several corner radars in ROS
Two variants:
1.Free-Space model using occupancy grid maps
2.Geometrical obstacle representation using bounding polygons
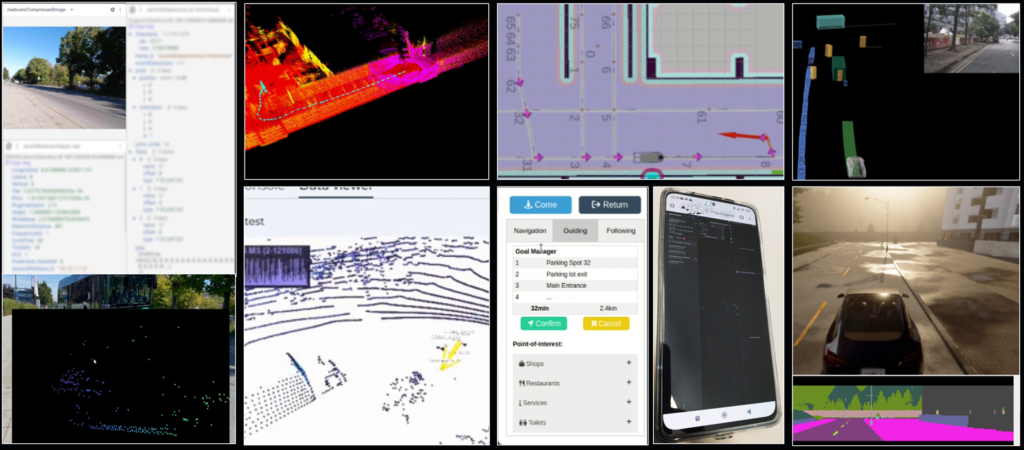
Surround View and Parking Assistant
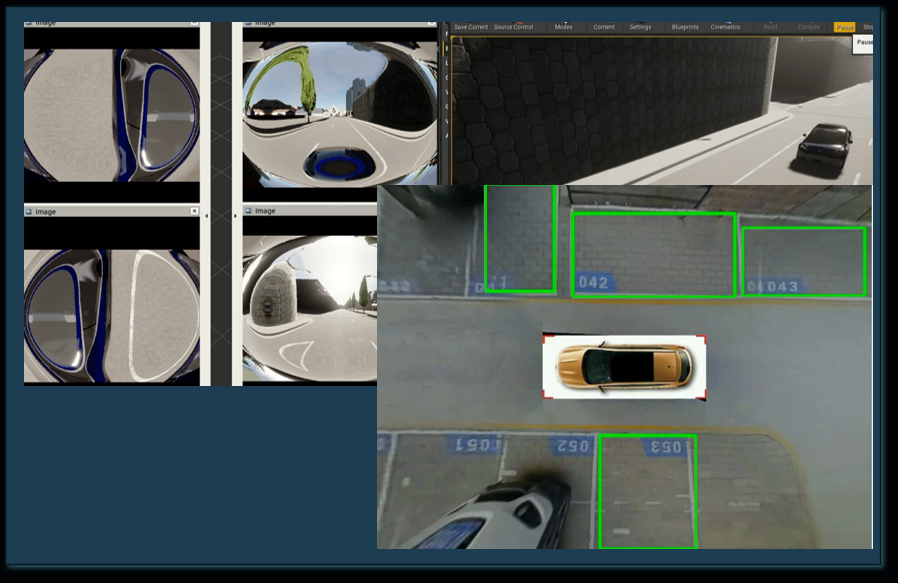
Creation of a central 360° environmental model from several cameras
Three steps:
1. Bird-eye view for the driver by merging 6 cameras
2. Detecting of free and occupied parking spaces
3. Dubbin / Reed based trajectory planner
Simulation and real vehicle
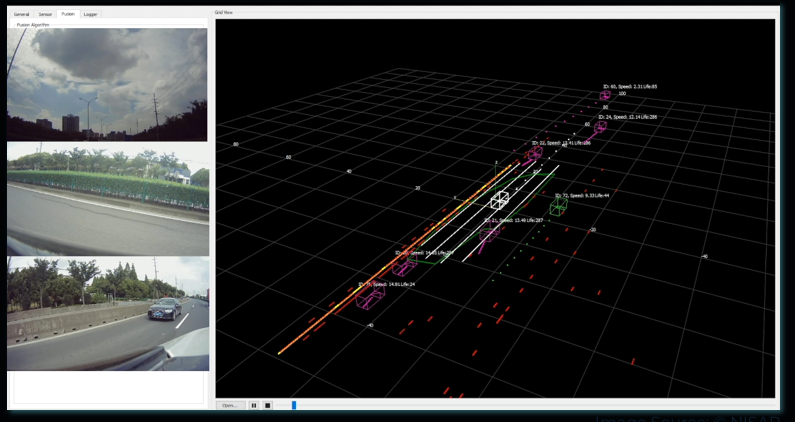
Radar-Camera-Fusion & Object-Tracking
Car equipped with radar and cameras, each with their own object tracking
• Fusion of the tracks
• Increased accuracy
• Increased robustness
• Tracking beyond the limits of the sensors’ fields of view
• Tracking of lanes and assignment of objects
• Planning the navigable space taking into account the objects’ own movement and prediction
AI-based Cyber Security
AI-based design wizards to enable integrating Cyber Security already in early design phases while at the same time easing the task for Cyber Security Engineers

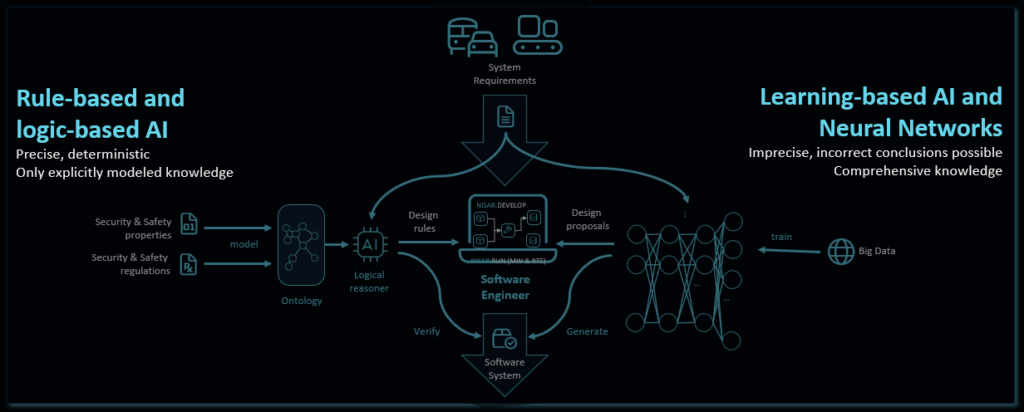
Published at AI.BAY conference, 2023, with TH Ingolstadt CARISSMA, D.Bayerl
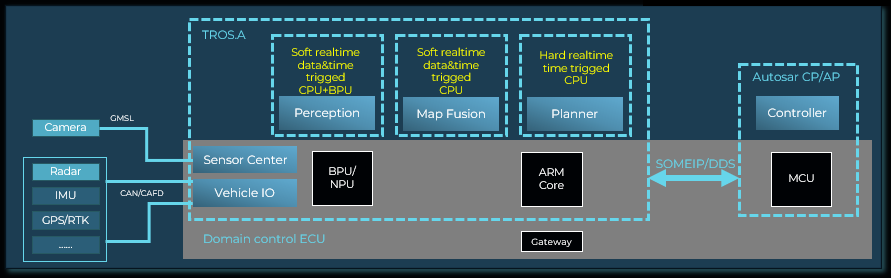
Our test vehicle in Shanghai

Test Vehicle Platform
– MG4 Mulan
Sensor Setup
– 7 Cameras – 2-8M Pixels
– 4 Fisheye cameras
– 3 LRR-Radars
Software Components integrated
– BEV Model for Perception
– HD Map Fusion
– Radar + Camera Object Fusion
– NoA Navigation on Autopilot
– Middleware: TROS, ROS and Autosar
Current Hardware Platforms
– HR J5 x 2 256 TOPs + Semidrive X9U
– HR J5 x 1 + NXP SR32G
– NVIDIA Orin + TC397
– HR J3 x 1 3 TOPs + Aurix
…additional impressions…